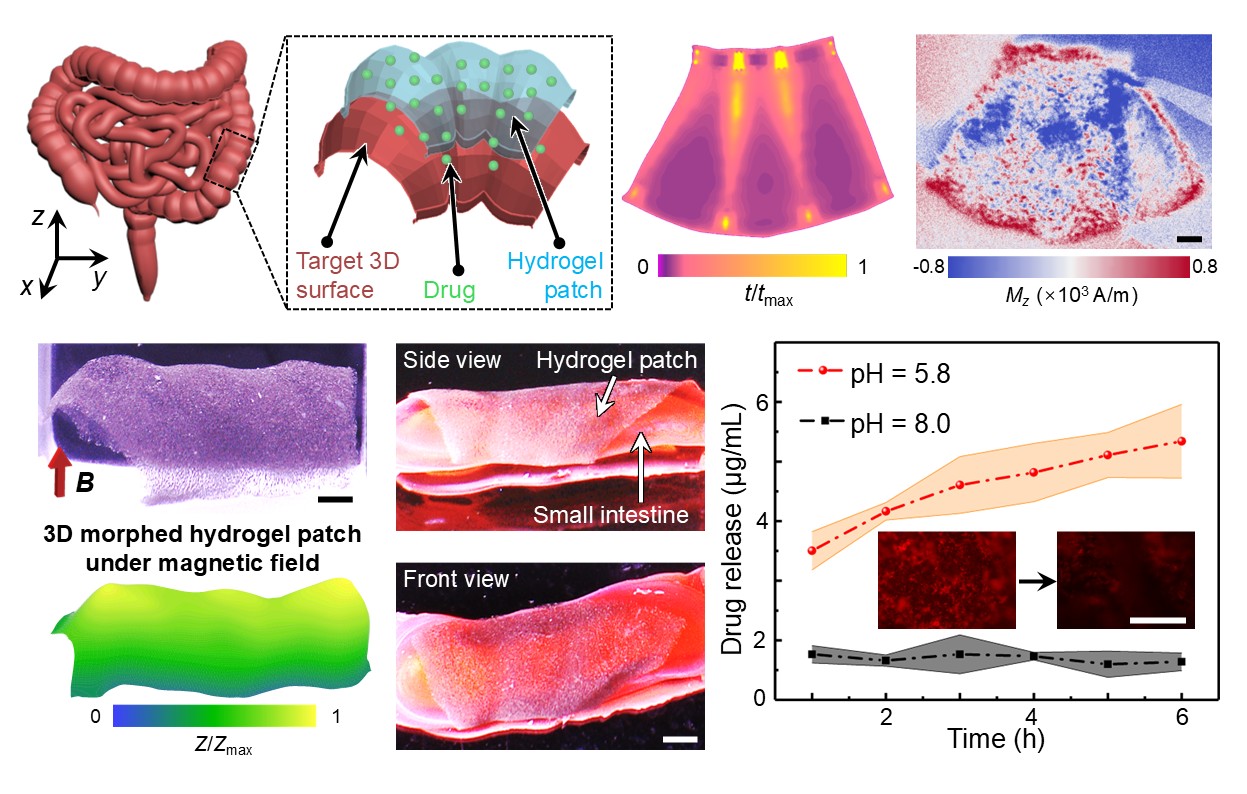
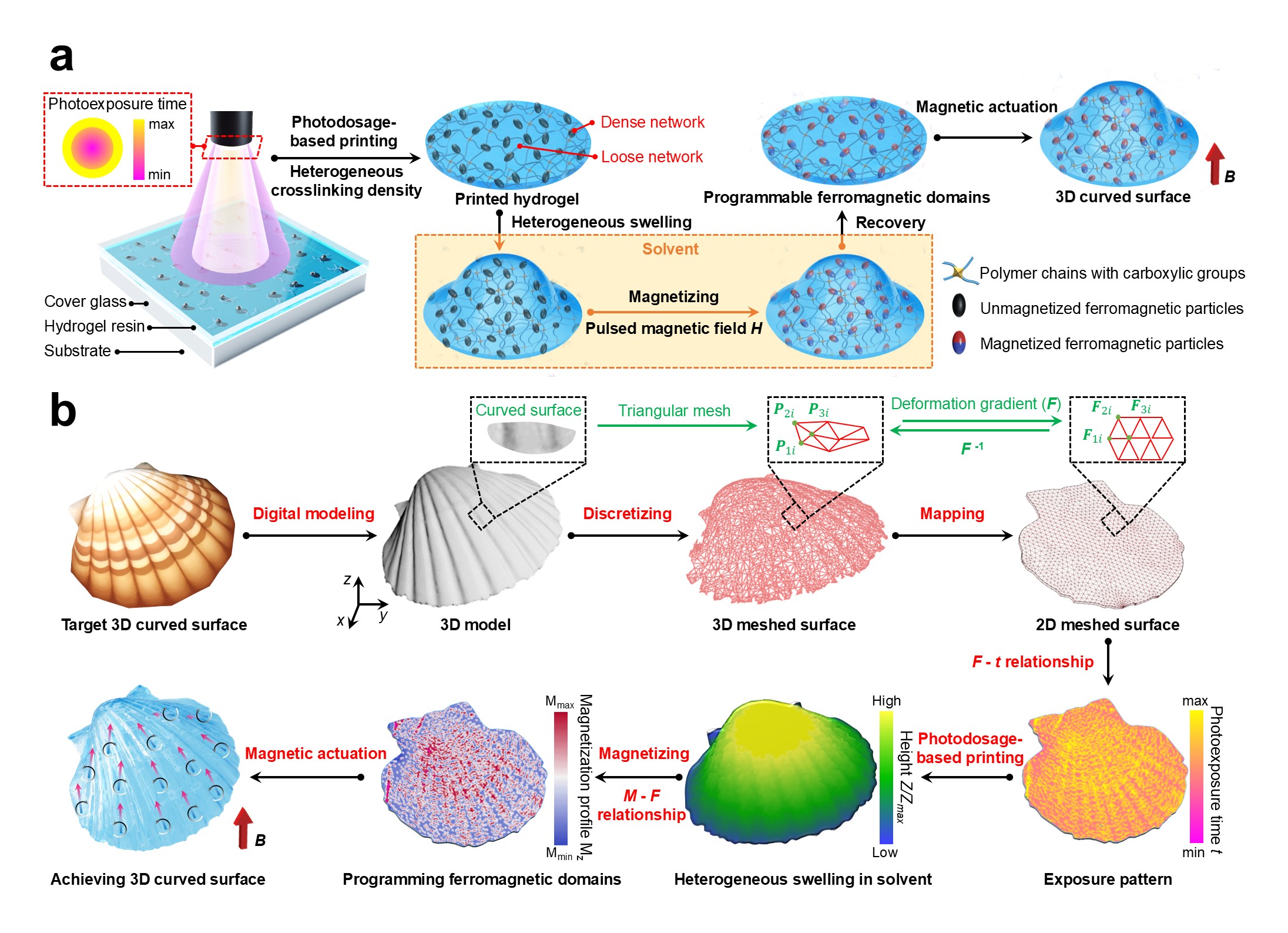
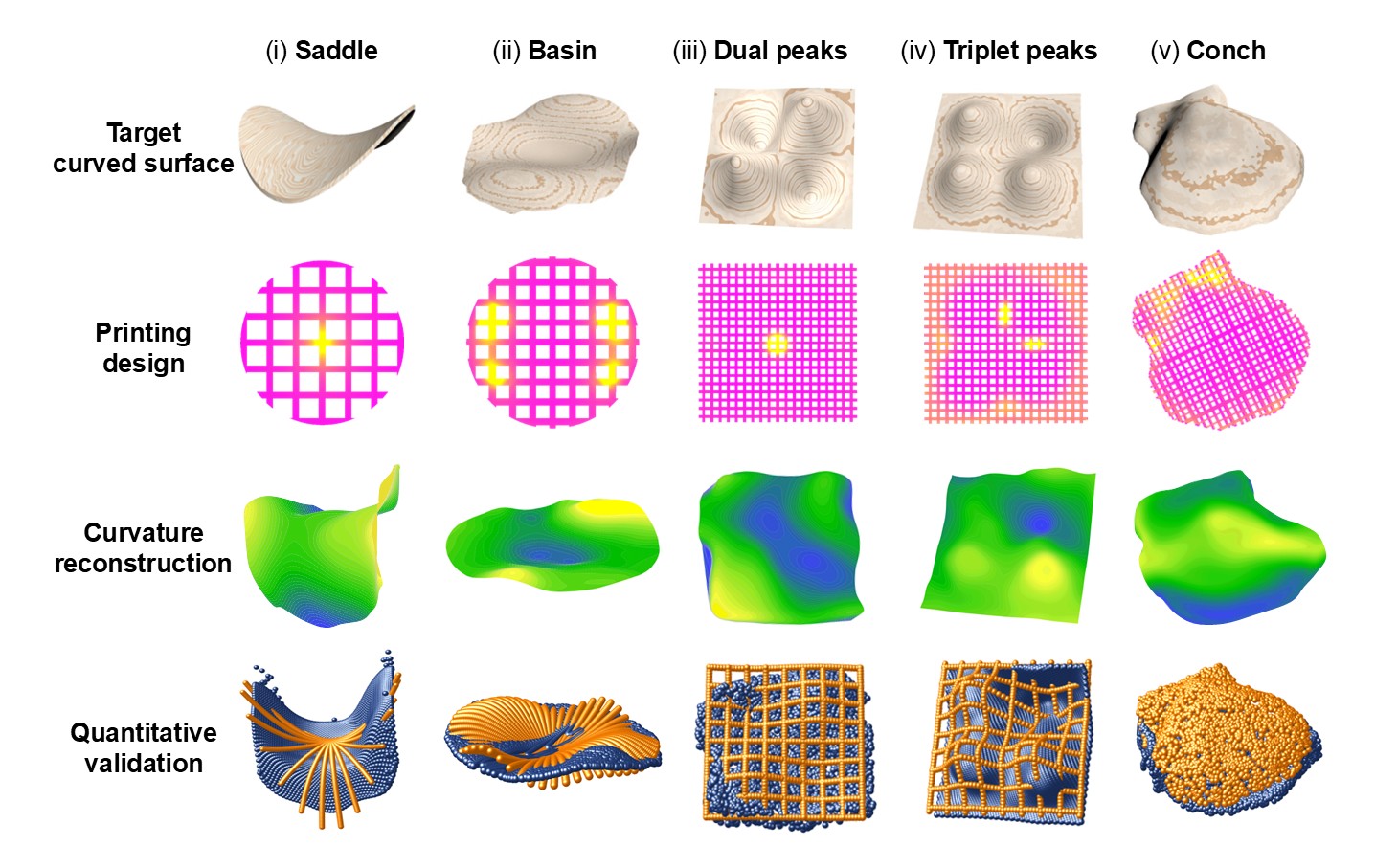
A collaborative research team led by Professor Zhang Li at The Chinese University of Hong Kong (CUHK)’s Department of Mechanical and Automation Engineering has developed an innovative inverse programming technology for magnetic soft materials. This technology allows for precise programming of the magnetisation distribution, enabling the material to be controllably transformed into the desired three-dimensional surface according to specific requirements under magnetic actuation. This breakthrough opens new application possibilities in many fields, including information storage, biomimetic soft robots and precision medical technology. The research results have been published in the internationally renowned journal Nature Synthesis. New technology overcomes challenges in inverse programming of magnetic soft materials Inspired by nature, the research team observed how the soft tissues of living organisms dynamically present 3D curved surfaces, a capability that plays a critical role in vital physical processes and the maintenance of health. For example, human skin and muscles can change shape according to the environment and as a result of movement. However, the complexity of magnetic interactions and the computational demands have made such materials challenging to design and fabricate. Traditionally, simulating and designing magnetic soft material modules has been a highly challenging task requiring significant time and resources. To overcome this technical bottleneck, Professor Zhang and Dr Xia Neng from CUHK, along with Professors Jin Dongdong and Ma Xing from Harbin Institute of Technology (Shenzhen), and Professor Wang Liu from the University of Science and Technology of China, collaborated to develop a new strategy. It leverages precise control of the light source to programme magnetic soft materials, enabling dynamical and reversible transformations into 3D surfaces under magnetic actuation. The team first prepared a hydrogel material infused with magnetic particles and then developed a photocuring 3D printing method to process these magnetic hydrogels. By precisely adjusting the intensity distribution of the light source during printing, they achieved a heterogeneous magnetic hydrogel, temporarily transforming from its original 2D shape into a 3D surface. By applying a pulsed magnetic field, they magnetised the deformed magnetic soft material, creating a 3D magnetisation distribution that allows it to present different 3D shapes under the influence of an external magnetic field. Additionally, the team developed a computational method to guide the design of the light source, ensuring that the printed magnetic soft material accurately reproduces the target 3D surface under magnetic actuation. This innovative strategy significantly reduces the complexity and improves the precision and efficiency of programming magnetic soft materials. Optimising precision surgical procedures to enhance efficiency Professor Zhang said: “Most human organs have intricate 3D morphologies. For instance, the gastrointestinal tract features numerous wrinkled structures, making it very challenging to develop medical patches for targeted treatment. The inverse programming technology for magnetic soft materials that we propose is expected to assist medical professionals in customising patches to fit the specific morphology of a patient’s gastrointestinal tract, ensuring a conformal fit on the surface of the affected organ for improved treatment efficacy.” Dr Xia, the first author of the research paper, noted that the research results can also be applied to human face replication, information storage and the development of biomimetic soft robots through precise adjustment of light sources. Professor Zhang’s team will continue to explore further developments and biomedical applications of magnetic soft materials, hoping to contribute to academia and society, and promote the development of innovative technology. The project has been supported by the Hong Kong Research Grants Council (RGC), the Croucher Foundation, the CUHK internal grants, the National Natural Science Foundation of China, the Guangdong Basic and Applied Basic Research Foundation, the Shenzhen Science and Technology Program, the SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems and the Multi-Scale Medical Robotics Center (MRC), InnoHK. For the full research, please visit: https://www.nature.com/articles/s44160-025-00746-2 |
|